|
Kategorie |
 |
 |
Producent |
|
|
|
Przydatne informacje |
|
|
|
|


|
|
|
|
Elementy systemu sonaru

Każdy system sonaru (echosonda) składa się z dwóch podstawowych elementów:
- Echosondy w której znajduje się wyświetlacz LCD, mikroprocesor i obwody nadawania / odbioru sygnału przetwornika. Montuje się go w miejscu widocznym dla wędkarza .
- Przetwornika który zawiera ceramiczny elektryczny element nadający / odbierający sygnał dźwiękowy, podłączony do echosondy przez kabel koncentryczny. Musi być zamontowany tak aby miał stały kontakt z wodą.
Jak działa sonar w echosondzie

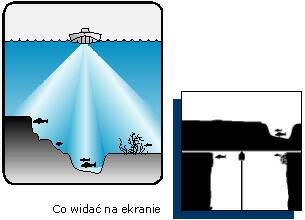
- Sonar emituje w wodzie precyzyjne impulsy dźwiękowe ("Ping") które rozchodzą się w wodzie w formie wiązki o kształcie "kropli wody".
- Impulsy dźwiękowy odbijają się od obiektów w wodzie takich jak dno, ryby i inne zanurzone obiekty (nawet pęcherzyki powietrza).
- Odbite impulsy dźwiękowe są wyświetlane na ekranie LCD echosondy.Za każdym razem gdy nowe odbicia są otrzymywane, stare odbicia przesuwają się w lewo na ekranie LCD, tworząc efekt przesuwania się widoku (scrolling effect).
- Gdy wszystkie te odbicia są wyświetlone jedno obok drugiego na ekranie LCD tworzy się łatwy do interpretacji obraz dna, ryb i obiektów pod wodą.
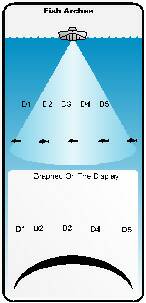
Obraz który widzisz na ekranie LCD
Częstotliwości pracy sonaru
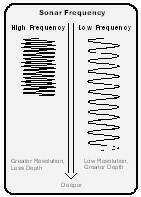 Fale dźwiękowe są wysyłane z różną częstotliwością w zależności od tego do czego mają służyć. ˇ Bardzo wysokie częstotliwości (455kHz) są używane dla najdokładniejszego rozróżniania obiektów lecz ich zasięg działania jest ograniczony .
Fale dźwiękowe są wysyłane z różną częstotliwością w zależności od tego do czego mają służyć. ˇ Bardzo wysokie częstotliwości (455kHz) są używane dla najdokładniejszego rozróżniania obiektów lecz ich zasięg działania jest ograniczony .
- Wysokie częstotliwości (200kHz) są najczęściej używane w sonarach ponieważ mają optymalną zależność między zasięgiem działania i uzyskiwaną dokładnością (rozdzielczością). ˇ Niskie częstotliwości (50-83kHz) są zwykle używane tam gdzie trzeba dotrzeć do większych głębokości.
Humminbird używa wielu różnych częstotliwości aby optymalnie wykorzystać sonar do różnych zastosowań.
Wiązka sygnału sonaru
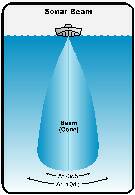 Impulsy dźwiękowe ("Ping") wysyłane przez sonar rozchodzą się w wodzie w formie WIĄZKI o kształcie "kropli wody".
Impulsy dźwiękowe ("Ping") wysyłane przez sonar rozchodzą się w wodzie w formie WIĄZKI o kształcie "kropli wody".
- Wiązki sygnału wyróżnia się za pomocą pomiaru kąta stożka sygnału przy którym spadek sygnału wynosi określoną liczbę decybeli "DB downpoint".
- Różni producenci stosują do pomiarów różną liczbę decybeli o którą spada natężenie sygnału dźwiękowego (DB downpoint); niższe wartości wskazują że kąt mierzony jest na niższym poziomie natężenia dźwięku.
- Na podstawie odbić otrzymanych z pojedynczego stożka (wiązki sygnału) nie można określić kierunku z jakiego sygnał pochodzi , a jedynie odległość przetwornika od obiektu .
Humminbird podaje kąt wiązki sygnału (stożka) przy -10db - bardzo czuły przetwornik .
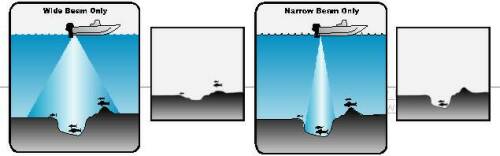
Porównanie wiązek sygnału sonaru
Zwykle projektant echosondy musi wybrać między wiązką o szerokim lub wąskim stożku sygnału.
- Szerokie wiązki sygnału (stożki) pokrywają większą powierzchnię dna lecz jednocześnie dostarczają mniej szczegółów dna bo odbicia są otrzymywane jednocześnie z całej tej powierzchni.
- Wąskie wiązki sygnału (stożki) pokrywają mniejszą powierzchnię dna lecz jednocześnie dostarczają więcej szczegółów dna bo odbicia są otrzymywane z mniejszej powierzchni Humminbird używa wielu stożków sygnału aby otrzymać najlepszy rezultat w odwzorowaniu dna i rozróżnieniu obiektów zanurzonych.
Wielostożkowa technologia echosond Humminbird
Humminbird rozwinął technologię Dual Beam o dwóch częstotliwościach pracy ( dwóch stożkach ) aby zapewnić jak najszersze pokrycie dna i jednocześnie największą dokładność struktury dna i występowania ryb.
- 20° 200kHz wąski środkowy stożek sygnału pokazuje ryby i strukturę dna. Wąski stożek ma większą dokładność od szerokiego stożka.
- 60° 83kHz szeroki stożek pokazuje TYLKO symbole wykrytych ryb.
 Zaawansowana technologia DualBeamPLUS używa dwóch współosiowych wiązek sygnału (stożków) oraz zaawansowanych algorytmów aby obliczyć i zestawić dane otrzymane z obu wiązek sygnału .
Zaawansowana technologia DualBeamPLUS używa dwóch współosiowych wiązek sygnału (stożków) oraz zaawansowanych algorytmów aby obliczyć i zestawić dane otrzymane z obu wiązek sygnału .
- 20° 200kHz wąski stożek sygnału pokazuje ryby i strukturę dna .
- 60° 83kHz szeroki stożek sygnału pokazuje ryby i strukturę dna .
- Odbicia z obu wiązek są zestawiane na ekranie razem lub mogą być pokazane oddzielnie (funkcja echosond serii 500 , Matrix , 900).
W odróżnieniu od konkurencyjnych rozwiązań używających technologii dwustożkowej/dwóch częstotliwościach pracy Humminbird używa obu częstotliwości jednocześnie . Wielu producentów zmusza użytkownika do wybrania jednej lub drugiej częstotliwości pracy.
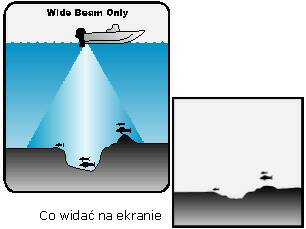
Korzyści z technologii Dual Beam
Pokrycie dna szerokiej wiązki i jednocześnie dokładność wąskiej wiązki sygnału.
Typowa echosonda konkurencji o jednym szerokim stożku
Technologia Dual Beam
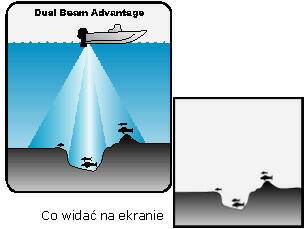
Używana wyłącznie przez HUMMINBIRD technologia Dual Beam 83kHz sprawia że system echosond HUMMINBIRD jest dostosowany do wymagań klienta i jednocześnie dużo tańszy w porównaniu z innymi systemami dwustożkowymi.
- Szeroki stożek daje większe pokrycie dna i występowania ryb.
- Zasięg pracy do 500m sprawdza się w większości zastosowań, także w głębokich wodach.
- Dokładniejsze wskazania podczas trollingu z powodu mniejszej niż systemy pracujące na 50kHz podatności na hałas zewnętrzny.
 Super szerokie pokrycie technologii QuadraBeam
Super szerokie pokrycie technologii QuadraBeam
Technologia QuadraBeam wykorzystuje dwie koncentryczne wiązki sygnału PLUS dwie boczne wiązki sygnału sonaru po lewej i prawej burcie dla uzyskania super szerokiego kąta pokrycia dna .
- 20° 200kHz wąski stożek sygnału pokazuje ryby i strukturę dna .
- Dwa stożki 45° 455kHz są skierowane w dół po kątem w lewo oraz w prawo . Rozpoznają obecność ryb , pokazują strukturę i kształt dna w zakresie do 50 m głębokości
- Razem zapewniają pokrycie kątem 90° .
 Korzyści z technologii QuadraBeam
Korzyści z technologii QuadraBeam
Najszersze pokrycie oraz wskazanie kierunku występowania ryb i ukształtowania dna .
- Identyfikuje ryby i pokazuje kształt dna tam gdzie typowa echosonda tego nie zobaczy.
- Zawsze widzisz dno i ryby dokładnie pod łodzią.
- Unikalna prezentacja na ekranie jednocześnie widoku po łodzią w dół oraz na boki.
Zastosowania technologii QuadraBeam
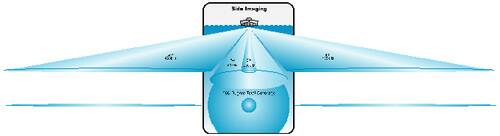
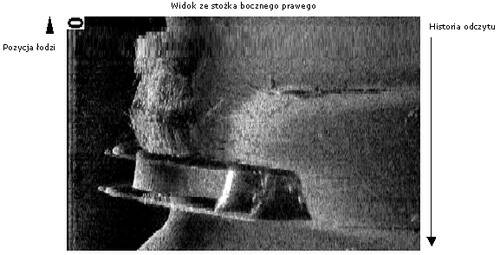
Humminbird Multi-Beam Technology
WideSide Boczne skanowanie echosondy HUMMINBIRD pracuje jednocześnie wysyłając wąski stożek/wiązkę w dół oraz dwa podpowierzchniowe wąskie stożki skierowane jeden w lewo a drugi w prawo od burty.
- Wąski środkowy stożek pokazuje głębokość pod łodzią.
- Dwa boczne stożki pokazują zarys brzegu , strukturę i roślinność oraz występowanie ryb na płyciznach.
- Wide Side jest opcjonalnym przetwornikiem przeznaczonym do wszystkich modeli z technologią QuadraBeam .
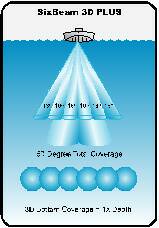 Trójwymiarowa technologia Humminbird
Trójwymiarowa technologia Humminbird
- Technologia trójwymiarowa HUMMINBIRD 3D Sonar wykorzystuje pomiar głębokości z sześciu stożków/wiązek sygnału aby uzyskać trójwymiarowy zarys dna od lewej do prawej burty . Gdy łódź się przemieszcza , historia pomiarów wyświetlona na ekranie LCD tworzy trójwymiarowy obraz dna i obiektów nad nim się znajdujących.
- Sześć 16° 455kHz wiązek sygnału tworzy 53° całkowity kąt pokrycia który ma zasięg do 72 metrów.
- Trójwymiarowy sonar 3D mierzy głębokość także między poszczególnymi wiązkami co daje razem 11 odczytów głębokości co powoduje że zarys dna jest bardzo dokładny.
- Dwuwymiarowy obraz dna uzyskiwany jest z odczytu dwóch pośrednich stożków sygnału 455kHz i ma zasięg do 108 metrów(360 feet).
- Dla penetracji głębszych warstw wody możliwe jest użycie przetwornika dwustożkowego o częstotliwości 83kHz o zasięgu do 300 metrów.
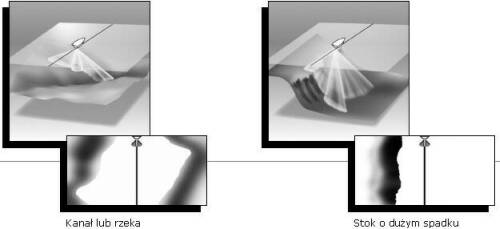
 Korzyści z technologii trójwymiarowej 3D Sonar
Korzyści z technologii trójwymiarowej 3D Sonar
- technologia trójwymiarowa 3D sprawdza się najlepiej w odwzorowywaniu dna strumieni , rzek , kanałów , spadków dna a także wraków statków i innych obiektów zanurzonych związanych z dnem .
- technologia 3D sonduje występowanie ryb od burty do burty i następnie umiejscawia występowanie ryb w odpowiedniej odległości od dna.
- technologia 3D pokazuje cieniowany obraz dna , który to sposób można ręcznie ustawić (światło/cień) co powoduje że obraz jest bardzo rzeczywisty i czytelny.
- technologia 3D daje najszerszy i najdokładniejszy obraz zarysu dna .
- Dwuwymiarowy obraz w tej technologii jest także dostępny.
Technologia trójwymiarowa 3D jest stosowana wyłącznie w echosondach HUMMINBIRD .
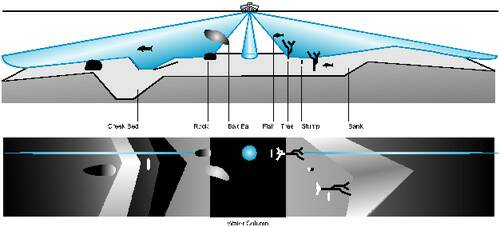
Sonar kierunkowy
Kierunkowy sonar daje dwa precyzyjne stożki tak skierowane aby wyświetlić kontury dna, strukturę i ryby z jakością zdjęcia.
- Dwa boczne stożki mają bardzo ostry kąt, aby wycinki dna były w wysokiej rozdzielczości.
- Boczne stożki patrzą na odległość 75m i głębokość 25m.
- Podwójny stożek środkowy ( Dual Beam ) ma kąt 20° i 74°.
Sonar kierunkowy - widoki
- Sonar dostarcza obrazy fotograficzne dna jako widok z góry do głębokości 25m.
- Sonar kierunkowy oferuje najszerszy, najbardziej precyzyjny widok, który jest znany wędkarzom, jako " co i gdzie na dnie ".
- Sonar daje największy kąt tj. 160° pokrycia do lokalizacji ryb i ławic w otwartej wodzie.
Jak działa sonar kierunkowy
Kierunkowy sonar pomaga wędkarzom w:
- Zbadaniu większej powierzchni dna w krótszym czasie - wspaniałe narzędzie do przedłowienia
- Zbadać strukturę, spadki i kontury dna, które mogą być pominięte w tradycyjnych echosondach
- Zrozumieć strukturę dna oraz jak bardziej efektywnie wykorzystać te informacje aby nie " dać szansy " rybie.
- Zbadać ławice i indywidualne ryby na otwartej wodzie.
Nadajnik i odbiornik
Nadajnik i odbiornik funkcje:
Charakterystyka nadajnika
Zmienna moc wyjściowa = odpowiednia moc do warunków
Bardzo krótkie impulsy = lepsza separacja obiektów / rozdzielczości,
Duża częstotliwość = redukcja zakłóceń przy większej czułości.
Charakterystyka odbiornika
Szeroki zakres dynamiki = odbiera szeroki zakres sygnałów w szybko zmieniających się warunkach.
Optymalizacja szerokości fali = redukcja zakłóceń przy większej czułości.
Nadajnik i odbiornik HUMMINBIRD, są zaprojektowane z powyższymi cechami tak aby dostarczyć optymalnych wskazań w zmiennych warunkach.
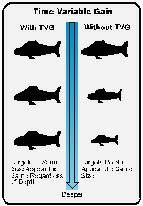 Zmienne w czasie wzmocnienia (TVG)
Zmienne w czasie wzmocnienia (TVG)
Zmienne w czasie wzmocnienia jest to proces " normalizacji " wracających danych, tak że informacja jest odpowiednio zwymiarowana odpowiednio do głębokości / odległości.
- Wirtualny sonar TVG - jest używany we wszystkich echosondach
- W innych produktach TVG, może mieć inne oznaczenie np. ( DCG itp.)
Wszystkie produkty HUMMINBIRD używają TVG;
Moc wyjściowa
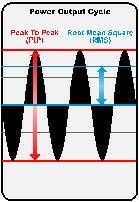 Moc wyjściowa jest wartością energii generowanej przez nadajnik. Jest ona mierzona na dwa sposoby:
Moc wyjściowa jest wartością energii generowanej przez nadajnik. Jest ona mierzona na dwa sposoby:
- Uśredniona moc w okresie (RMS). RMS jest najbardziej wiarygodną metodą.
- Od szczytu do szczytu (PTP). PTP jest podstawową metodą niezbyt dokładną.
Korzyści ze zwiększonej mocy wyjściowej
- Zdolność do detekcji mniejszych obiektów w większej odległości
- Zdolność do unikania " zakłóceń "
- Lepsze właściwości przy dużych prędkościach ( środowisko dużych zakłóceń )
- Zwiększenie głębokości.
Humminbird używa zmiennej mocy do warunków ekstremalnych i zawsze używa uśrednionej mocy jako główny wskaźnik.
 Separacja obiektu
Separacja obiektu
Separacja obiektu, to minimalna odległość pomiędzy obiektami wykrytymi przez sonar.
- Sonar Humminbird rozpoznaje obiekty oddalone o 65mm od siebie.
- Doskonała separacja dostarcza lepszej informacji o blisko siebie płynących rybach i rybach blisko dna.
- Są prowadzone prace nad sonarem rozróżniającym obiekty w odległości 20mm od siebie.
Selektywna identyfikacja obiektów (ryb) ID+
Selektywna identyfikacja ID+ analizuje w milisekundzie echo aby identyfikować rybę
- Echo ryby ma skłonność do bycia innym niż echa innych obiektów ( ale nie zawsze ); oparte to jest na badaniach laboratoryjnych.
- Mikroprocesor echosondy może zobaczyć detale w sygnale sonaru ( przetwornika ), jakich nie zobaczy ludzkie oko.
- Pokazuje ikonkę ryby i " czysty " sygnał sonaru w celu max informacji dla użytkownika.
 Łuk
Łuk
Łuk Technologia TruArch pokazuje łuk ryby ze stożka 60° i wysoko czułego odbiornika.
- Łuk ryby, to poprostu echo od obiektu poruszającego się w stożku. Dystans do obiektu najpierw maleje, a potem rośnie odpowiednio do geometrii stożka.
- Wielu wędkarzy woli widzieć łuki, zamiast ikonek ( ryb ).
Uwydatnienie Echa Sonaru SEE
Technologia SEE ciągle ewoluuje i optymalizuje wiele zmiennych w systemie, aby dostarczyć max ilość detali na ekranie.
SEE Łączy w sobie:
- Wysoką czułość odbiornika.
- Zmienną częstotliwość do optymalizacji separacji celu i zakresu głębokości.
- Zmienną moc wyjściową do optymalizacji głębokości.
- Wyjściowe, cyfrowe algorytmy obróbki.
Rezultatem technologii SEE jest:
- Zdolność do śledzenia BB do 12m ( nie praktyczna aplikacja, ale pokazuje czułość ).
- Sonar pokazuje w wodzie wszystko co interesuje wędkarza: ławice małych ryb, powierzchniowe zakłócenia wody, ryby, strukturę dna i termokliny.
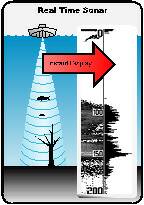 Sonar w czasie rzeczywistym RTS
Sonar w czasie rzeczywistym RTS
RTS nadaje i odbiera sygnały " pingi " sonaru w najkrótszym możliwym czasie w zależności od głębokości i natychmiast wyświetla na ekranie LCD.
- Więcej sygnałów tworzy obraz o większości ilości detali.
- RTS pracuje średnio 40 razy na sekundę.
- RTS może pracować do 100 razy na sekundę w bardzo płytkiej wodzie.
Szum (zakłócenia)
Szum, to niepożądany sygnał z sonaru zbierany do odbiornika. Szum jest widoczny na ekranie LCD jako małe punkty lub linie.
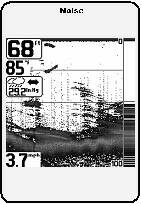 Szum może być spowodowany przez:
Szum może być spowodowany przez:
- Szum elektryczny od świec zapłonowych, pomp zęzowych i radia.
- Od innych echosond pracujących na tej samej częstotliwości.
- Od hydrodyakustyczny szum od rotacji śruby napędowej.
- Od generowanego szumu przez wodę podczas płynięcia z dużą prędkością.
Niskie częstotliwości są bardziej podatne na szum od wyższych częstotliwości.
Wyższe modele HUMMINBIRD posiadają aktywny filtr cyfrowy, który eliminuje szum ( zakłócenia ).
 Jak działa GPS
Jak działa GPS
- Konstelacja 24 satelit na geostacjonarnej orbicie.
- Wszystkie satelity wydają unikalny, zakodowany sygnał co sekundę, dokładnie w tym samym czasie.
- GPS odbiera sygnały na ziemi z " widocznych " satelit.
- W oparciu o przesunięcie czasowe pomiędzy każdym odbieranym sygnałem GPS określa odległość od satelity.
- Ze znanej odległości GPS matematycznie określa położenie odbiornika GPS.
- Z jednosekundowym uaktualnieniem odbiornik GPS odbiera położenie ( prędkość i namiar ).
Technologia GPS
 Standartowa dokładność GPS
Na początku lat 90 - tych, dokładność GPS była rzędu 100m w 95% czasu.
Dzisiaj dokładności GPS jest do 15m w 95% czasu.
Standartowa dokładność GPS
Na początku lat 90 - tych, dokładność GPS była rzędu 100m w 95% czasu.
Dzisiaj dokładności GPS jest do 15m w 95% czasu.
Rozszerzona dokładność GPS z drugim sygnałem do korekcji błędów.
Dyferencjalny GPS otrzymuje sygnały do korekcji błędów z drugiego źródła, takiego jak nadajnik umieszczony na ziemi lub z systemu ( WAAS ).
Kiedy są otrzymywane sygnały WAAS, dokładność wzrasta do 3m.
W praktycznych zastosowaniach dokładność jest rządu 2,5m w 50% czasu.
Główne pojęcia związane z GPS:
Kanał:
Liczba " słuchających " kanałów używanych do detekcji sygnałów z satelity.
Czas do pierwszego namiaru:
Trochę czasu jest wymagane do określenia pozycji, gdy odbiornik jest aktywowany.
WAAS:
Technologia drugiej korekcji dostarczana przez FAA.
Dyferencja ( odbiornik dyferencyjny ):
Drugi odbiornik do detekcji naziemnych sygnałów korekcji z USCG lub z nadajników dyferencjalnych.
NMEA 0183:
Międzynarodowy morski standard do przesyłu danych zawierających zmianę pozycji, prędkość i namiary.
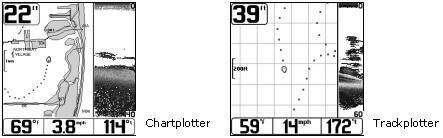
GPS I technologia Chartplotting
Różnica pomiędzy Chartplotting, a Trackplotting
- Trackplotting - jest dokładnym wskazaniem obecnej pozycji na siatce odniesienia.
- Chartplotting - jest dokładnym wskazaniem obecnej pozycji na mapie.
- Każda metoda wskazuje historię kursu i punkty drogi.
Kartografia z Navionics
Navionics jest produktem kompatybilnym z chartploterami Humminbird.
Navionics jest liderem w kartografii
Humminbird współpracuje z mapami - Navionics Gold Charts and HotMaps 2003/4 Gold
Kartografia jest nabywana przez klientów oddzielnie.
Kartografia jest dostarczana na kartach MMC " plug & play ".
Korzyści z używania kartografii Navionics
Modułowa kartografia: jedna cyfrowa mapa, a nie indywidualne mapy zebrane razem.
Wygląd: tak jak na mapach papierowych.
Kartografia oparta na chipie
Pokrycie wybrzeży Świata: Navionics - produkuje mapy dla prawie wszystkich krajów w tym również Polski - ( Całe Wybrzeże ).
Nawigacja - jest to używanie precyzyjnych informacji o pozycji w celu dokładnego podróżowania pomiędzy dwoma miejscami.
Główne terminy w nawigacji:
- Obecna pozycja: lokalizacja opisana za pomocą długości i szerokości geograficznej.
- Punkty drogi: geograficzna lokalizacja.
- Trasy: zdefiniowana ścieżka podróży pomiędzy dwoma lub więcej punktami drogi.
- Kurs: kąt odnośnie Północy pod jakim się podróżuje.
- Kierunek: kąt w którym łódź jest skierowana.
- Namiar: kąt pomiędzy kursem, a kierunkiem do punktu drogi.
- Droga do przebycia: Liniowa odległość pomiędzy pozycją, a punktem drogi.
- Błąd zejścia z trasy: Pomiar, jak daleko się jest od kursu.
- Czas do przebycia: Obliczenie czasu pozostałego do osiągnięcia punktu drogi.
|
|
|
|
|